Совместно с учеными из Северокитайского энергетического университета исследователи Южно-Уральского госуниверситета (вуз входит в Союз машиностроителей России) разработали цифровой двойник стенда и новый метод многопроекционного всенаправленного машинного зрения для робототехники. Система объединяет изображения с нескольких панорамных камер с линией структурированного лазерного света, позволяя роботу восстанавливать форму препятствий и с высокой точностью измерять расстояние до них. Кроме того, комплекс обойдется в десятки раз дешевле аналогов.
Благодаря встроенным многопроекционному всенаправленному зрению и лазеру робот может самостоятельно избегать пространственных препятствий на производстве и точно взаимодействовать с другими объектами.
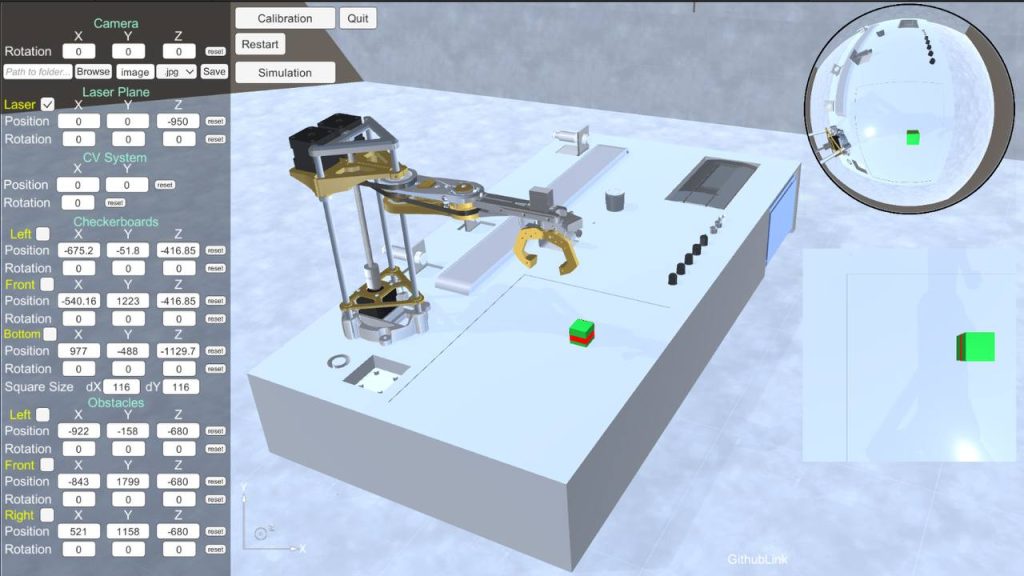
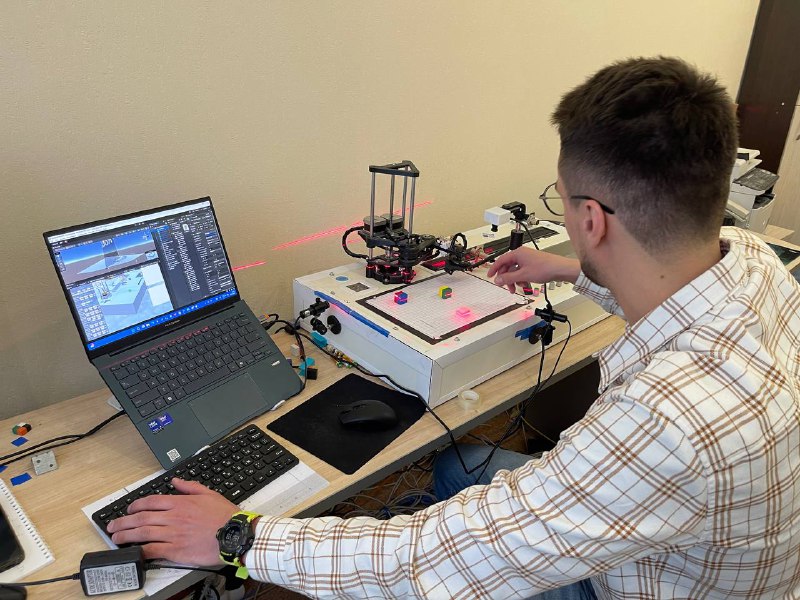
«В симуляторе, разработанном на базе платформы Unity 3D, у робота-манипулятора можно менять количество камер, их положение, параметры объектива и лазера, и сразу отправлять изображение на внешний вычислительный сервер, – пояснил доцент кафедры электропривода, мехатроники и электромеханики ЮУрГУ Иван Холодилин. – Далее специальный алгоритм объединяет данные со всех камер в единую карту окружения, и мы получаем форму объектов-препятствий на пути робота и расстояние до них. Испытания в виртуальной среде и на реальном стенде показали, что система уверенно «видит» всю «сцену» на 360 градусов и измеряет расстояние с погрешностью в несколько миллиметров».
Успешный эксперимент ученых открывает путь к более безопасной и точной навигации мобильных роботов, роботизированных манипуляторов и систем технического зрения на производстве.
Для измерения расстояния от робота до объектов разработчики ЮУрГУ объединяют изображения от нескольких панорамных камер с проецируемой лазерной линией, получая по ним карту глубины и контур препятствий. А чтобы система могла работать даже в темноте, ученые встроили в конструкцию робота лазерный излучатель.
«Лазерный луч при пересечении с объектом оставляет на нем цветную линию, так что и в темной обстановке мы сможем зафиксировать ее с помощью камер и рассчитать расстояние, – объяснил Иван Холодилин. – Алгоритм объединяет изображения от нескольких камер, по этой линии восстанавливает контур объекта и одновременно рассчитывает расстояние до него».
Среди главных конкурентных преимуществ разработки челябинских ученых – предельная точность измерения расстояния до окружающих объектов (в том числе в темноте) и сниженная в десятки раз стоимость по сравнению с аналоговыми системами, куда встроен дорогостоящий дальномер 2D LIDAR (стоимость – около 400 000 рублей). Результаты работы подробно описаны авторами в международном журнале Sensors.
Уникальная система многопроекционного всенаправленного зрения с лазерным излучателем может быть применена на предприятиях, где необходима сортировка объектов при помощи робота-манипулятора.