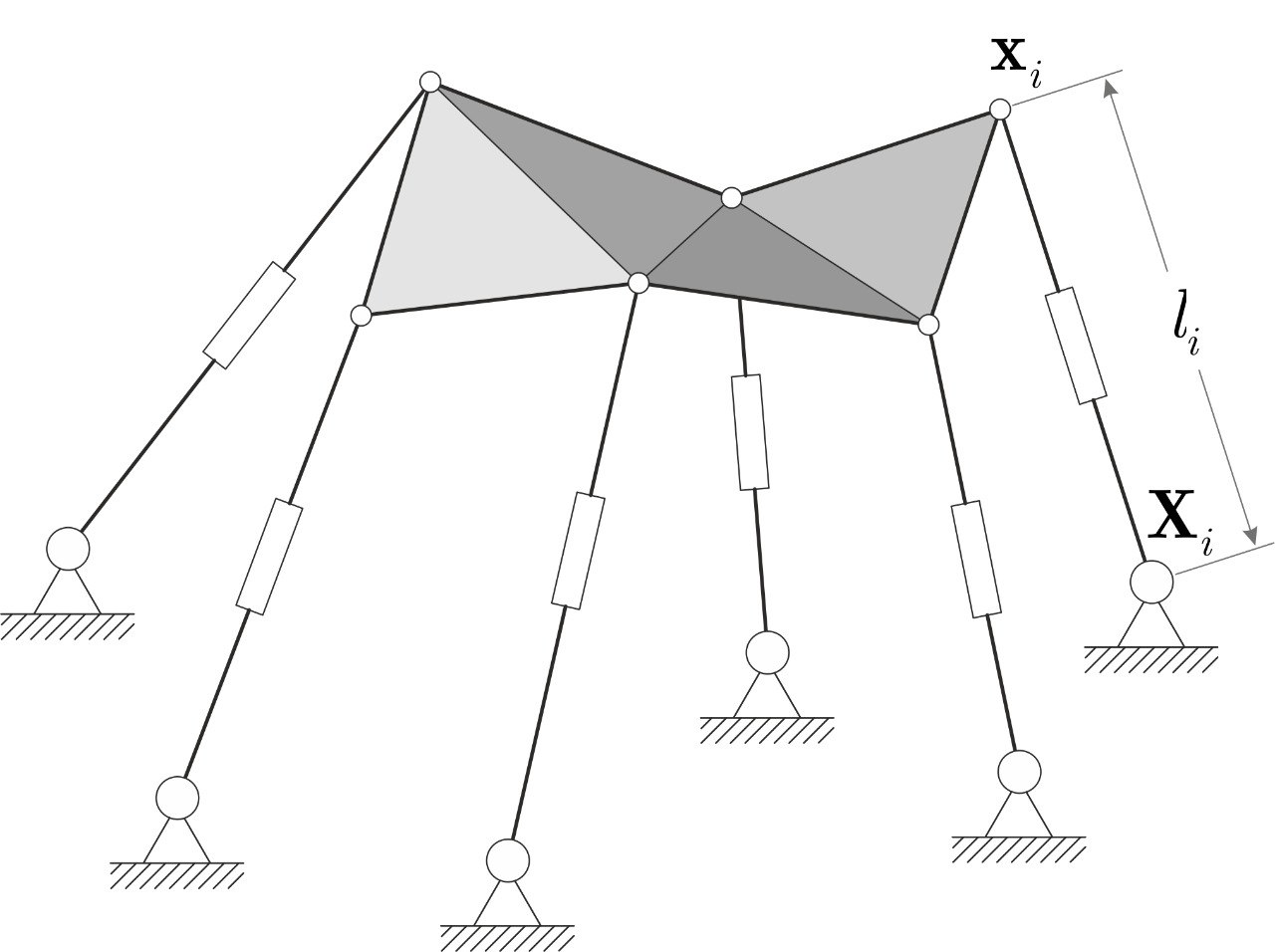
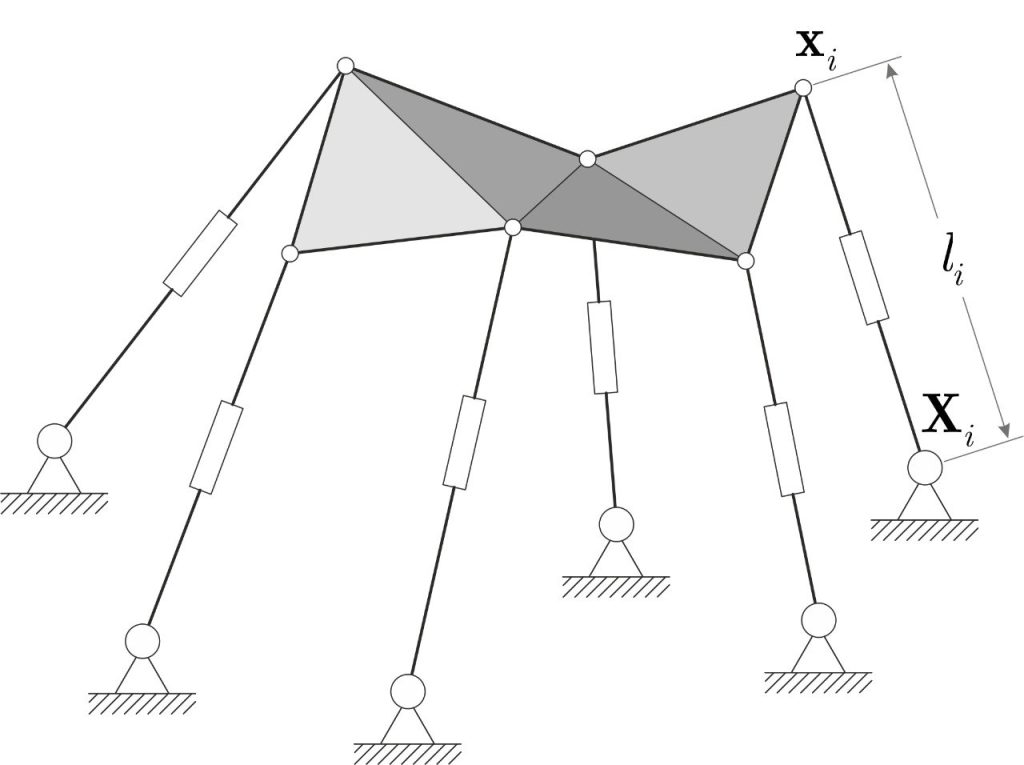
Доцент Института естественных и математических наук ЮУрГУ Евгений Мартюшев (вуз входит в Союз машиностроителей России) создал уникальный алгоритм для кинематического расчёта платформы Стюарта. Плоская платформа стоит на шести «ногах», прикреплённых шарнирами к полу. Каждая нога может сдвигаться-выдвигаться, меняя длину независимо от других. Платформа при этом может двигаться свободно в любом направлении: вверх-вниз, вперед-назад, влево-вправо, а также наклоняться и поворачиваться (тангаж, крен, рыскание).
Описать движение платформы – задача непростая, но необходимая в самых разных отраслях – от компьютерной игровой графики до авиасимуляторов, роботов-манипуляторов, тактильных устройств, хирургических роботов, радиотелескопов.
Евгений Мартюшев предложил уникальный подход к созданию алгоритма, описывающего движение платформы, основанный на методах алгебраической геометрии. Его версия алгоритма, по сравнению с уже существующими, сочетает высокую скорость и беспрецедентную точность расчёта.
Алгоритм Евгения Мартюшева реализован на популярных языках программирования MATLAB, Julia и Python и выложен в открытый доступ на платформе GitHub. Любой инженер, программист по всему миру может воспользоваться им. Корректность работы алгоритма подтверждена экспериментальными данными.
Использованный математический аппарат – метод шаблонов исключения – может быть применен для эффективного решения других сложных задач робототехники.
Работа выполнена в рамках реализации программы топ-уровня в сфере искусственного интеллекта при поддержке АНО «Аналитический центр при Правительстве Российской Федерации».
Результаты исследования опубликованы в международном журнале «Теория машин и механизмов» (Mechanism and Machine theory), входящем в ТОР-5% рейтинга Scopus (https://doi.org/10.1016/j.mechmachtheory.2025.106170 ).