Лаборатория технического зрения Южно-Уральского государственного университета (вуз входит в Союз машиностроителей России) совместно с региональной молодежной лабораторией электромеханических, электронных и электрохимических систем разработала собственный модуль для симуляции автономного транспорта.
Изобретение носит импотозамещающий характер и призвано заменить зарубежные аналоги, такие как NVIDIA Drive Sim. Авторы проекта предлагают уникальную гибкость модуля для моделирования специфичных сценариев, недоступных в коммерческих продуктах.
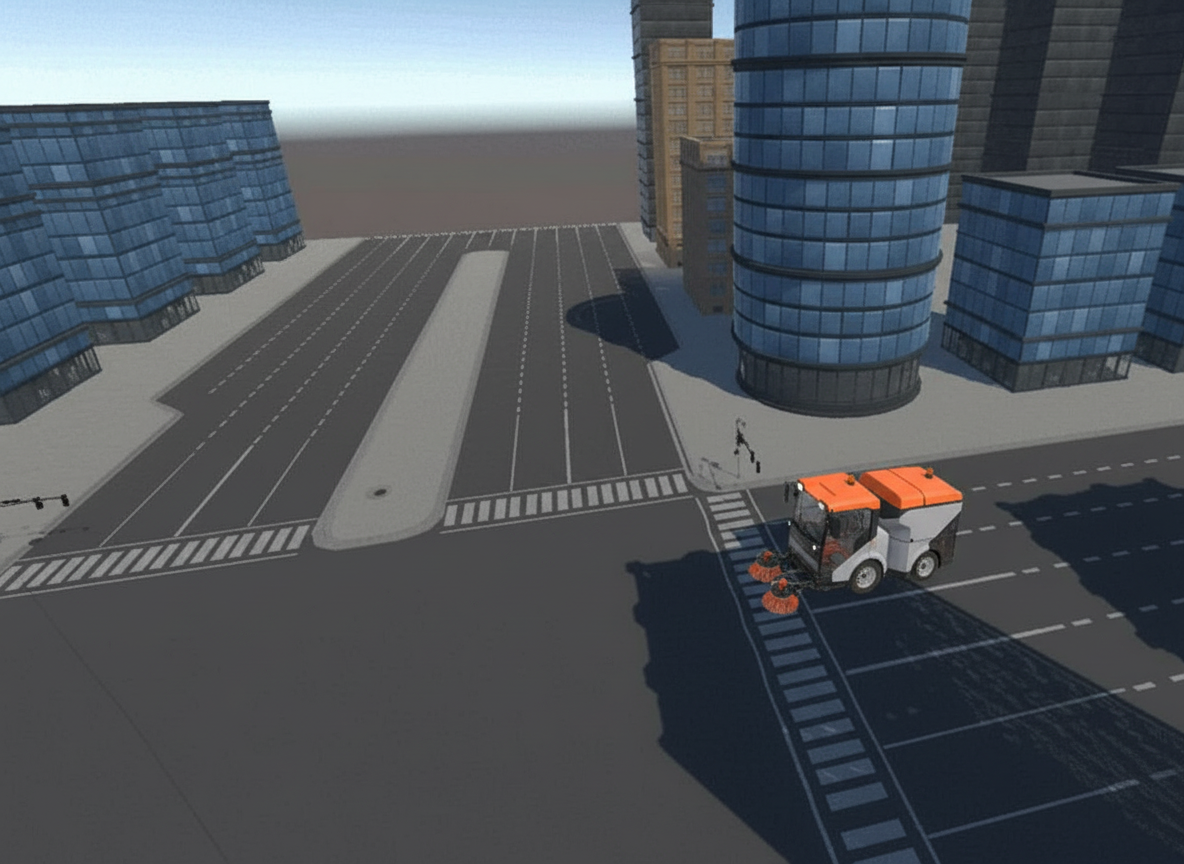
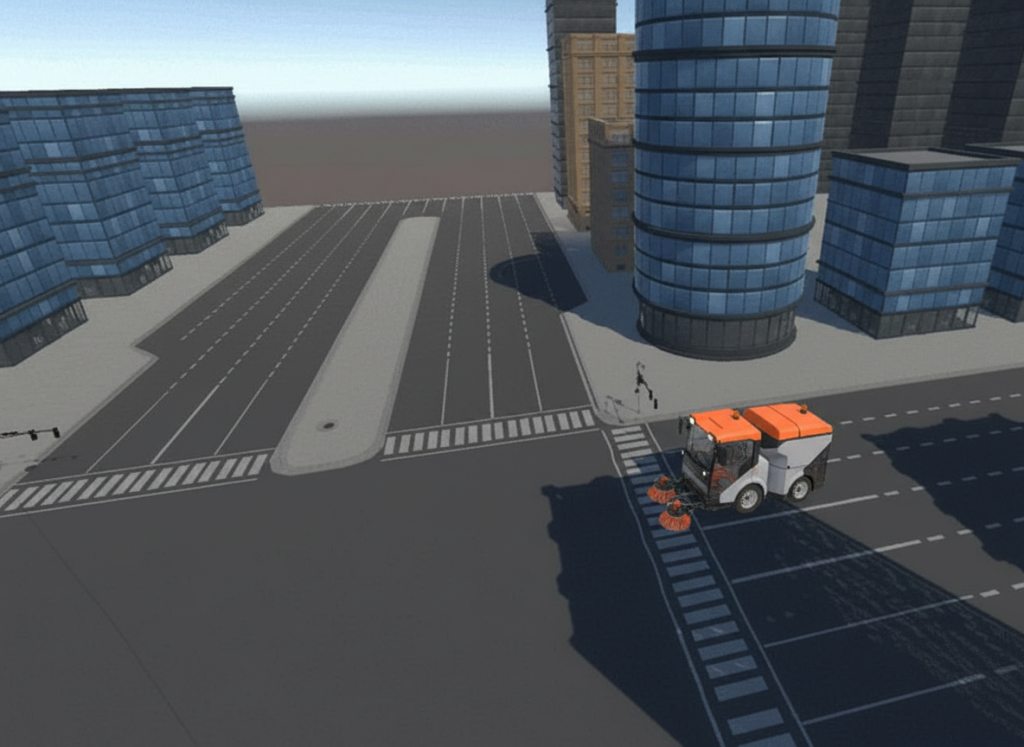
«Модуль агрегирования симулятора автотранспорта, созданный на движке Unity с Python-скриптами обработки видеоданных и управления, разрабатывается, прежде всего, для электрических машин. Предполагается, что разработка будет обкатываться на электрических машинах с беспилотным управлением», – поясняет автор проекта, руководитель лаборатории технического зрения Владимир Сурин.
В отличие от зарубежных «закрытых» систем, предложенный учеными ЮУрГУ модуль позволяет разработчикам свободно прописывать любые условия и параметры, что критически важно, к примеру, для тестирования электромашин, спецтехники и адаптации алгоритмов под российские реалии.
Изначально модуль создается для электрической и специальной техники (включая электрический автобус), но в ближайшей перспективе архитектура модуля позволяет адаптировать его для симуляции беспилотных летательных аппаратов (дронов) и наземных роботов.
Система построена на агрегации современного 3D-движка Unity (для создания реалистичного виртуального окружения) и Python (для алгоритмов компьютерного зрения и управления). Это позволяет в реальном времени отрабатывать сложные технические задачи, к примеру, такие как распознавание дорожного покрытия в сложных погодных условиях. В виртуальной модели всё моделируется внутри системы и не зависит от реальной погоды и необходимости перестраивать полигон.
В планах разработчиков – внедрение больших языковых моделей (LLM), в том числе, и для генерации непредсказуемых событий и сценариев на виртуальной дороге, а также создание мультиагентных симуляций, где множество автономных объектов взаимодействуют друг с другом.
Стратегия внедрения разработки включает два ключевых этапа: полная отработка алгоритмов в виртуальной среде и последующее тестирование на реальной тестовой площадке на территории кампуса ЮУрГУ, которая в настоящее время оцифровывается.
«Следующий уровень разработки – это тестовая площадка, – отмечает Владимир Сурин. – После того как мы отработали задачи модуля в виртуальном пространстве, мы будем пытаться выезжать на тестовую площадку. Она будет размещаться на заднем дворе ЮУрГУ. Специалисты Передовой инженерной школы уже пытаются оцифровывать ее. Под дроны мы эту систему тоже «заводим», но там просто надо больше моделировать, то есть учитывать сопротивление воздуха, движение воздушных масс, усложнять кинематику и так далее. Это более сложная задача, но она стоит у нас в плане».
На первом этапе продукт будет использоваться для внутренних академических исследований и разработок университета. В среднесрочной перспективе готовый продукт планируется предлагать учебным центрам для подготовки специалистов. Вопросы коммерциализации для промышленных партнеров будут прорабатываться после завершения основной стадии разработки.
11 ноября 2025 года командой проекта получено Свидетельство о государственной регистрации программы для ЭВМ № 2025691910 на «Модуль агрегирования симулятора автотранспорта на Unity с Python скриптами обработки видеоданных и управления», что еще раз на официальном уровне подтверждает актуальность и востребованность разработки.
Работа соответствует целям и задачам Национального проекта «Беспилотные авиационные системы».